
GS Robot MCP Server
Gausium OpenAPI MCP 服务器
该项目实现了一个 MCP(模型控制协议)服务器,作为 Gausium OpenAPI 的桥梁,允许 AI 模型或其他客户端通过标准化接口与 Gausium 机器人进行交互。
存储库: https://github.com/cfrs2005/mcp-gs-robot
建筑学
该服务器遵循分层架构,可以分离关注点并提高可维护性:

MCP 协议流程
下图展示了AI模型如何通过MCP协议与Gausium机器人进行交互:

Related MCP server: ROS2 MCP Server
特征
该服务器目前作为 MCP 工具支持以下功能:
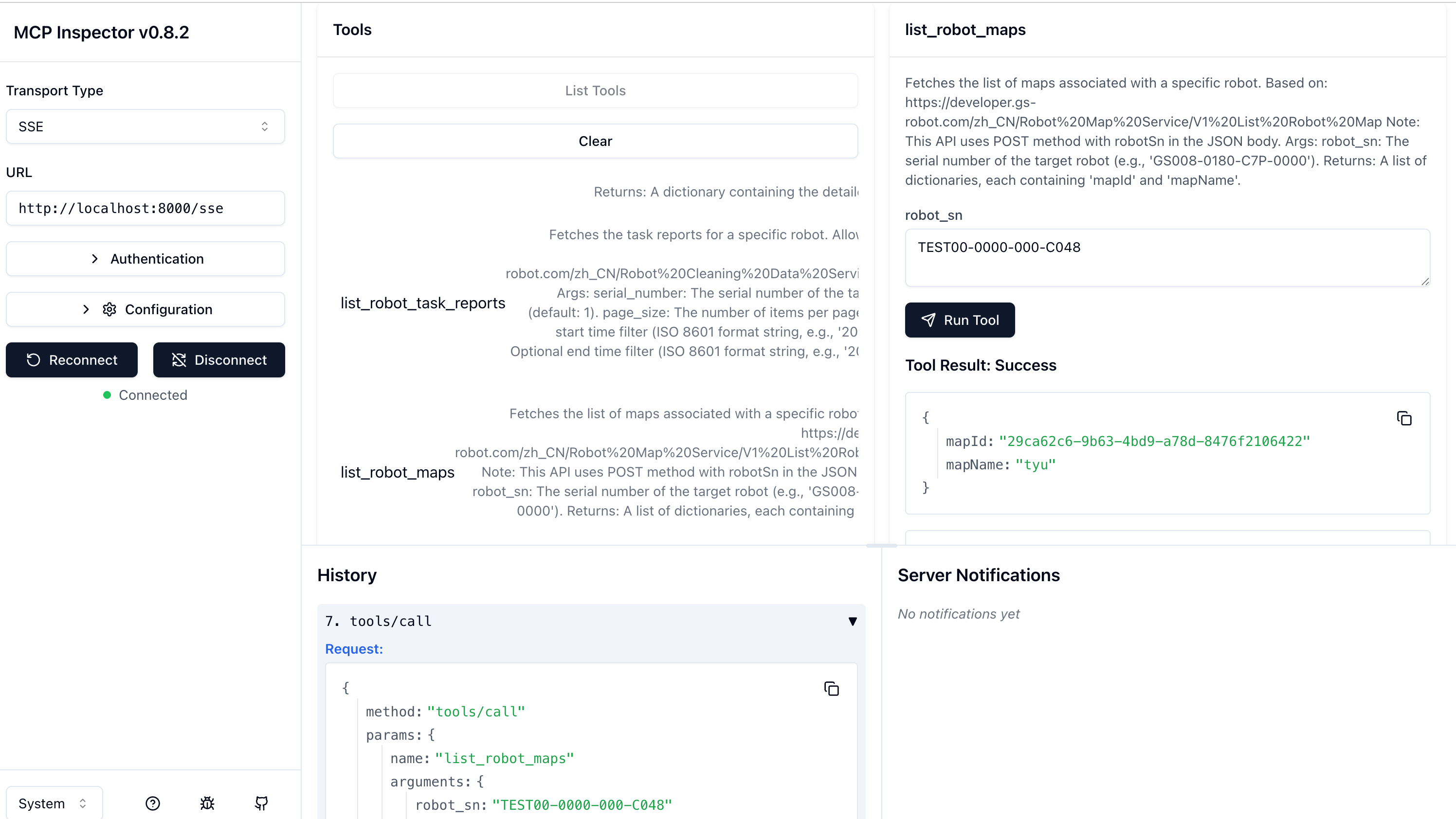
list_robots:列出可通过 API 密钥访问的机器人。(基于: List Robots API )get_robot_status:根据序列号获取特定机器人的详细状态。(基于: 获取机器人状态 API )list_robot_task_reports:检索特定机器人的清洁任务报告,并可选择时间筛选。(基于: 列出机器人任务报告 API )list_robot_maps:列出与特定机器人关联的地图。(基于:列出机器人地图 API )
项目结构
该项目遵循基于 Python 最佳实践的结构化布局:
.
├── .venv/ # Virtual environment directory
├── src/
│ └── gs_openapi/
│ ├── __init__.py
│ ├── api/ # Modules for direct API interactions
│ │ ├── __init__.py
│ │ ├── maps.py
│ │ └── robots.py
│ ├── auth/ # Authentication related modules
│ │ ├── __init__.py
│ │ └── token_manager.py # Handles OAuth token lifecycle
│ ├── config.py # Configuration (URLs, Env Vars)
│ └── mcp/ # MCP server specific implementations
│ ├── __init__.py
│ └── gausium_mcp.py # GausiumMCP class extending FastMCP
├── .gitignore
├── docs/
│ └── images/ # Documentation images
├── main.py # Main application entry point, tool registration, server run
├── README.md # This file
└── requirements.txt # Project dependenciessrc/gs_openapi/config.py:包含基本 URL、API 路径和环境变量名称。src/gs_openapi/auth/token_manager.py:管理获取和刷新 OAuth 令牌。src/gs_openapi/api/:包含模块(robots.py、maps.py),其功能可使用httpx直接调用 Gausium OpenAPI 端点。src/gs_openapi/mcp/gausium_mcp.py:定义集成 API 调用和令牌管理的GausiumMCP类。main.py:初始化GausiumMCP,使用@mcp.tool()将 API 功能注册为 MCP 工具,配置基本日志记录,并使用mcp.run()启动服务器。
设置和运行
克隆存储库:
git clone https://github.com/cfrs2005/mcp-gs-robot.git cd mcp-gs-robot使用
uv创建并激活虚拟环境:uv venv source .venv/bin/activate # On Windows use `.venv\Scripts\activate`使用
uv安装依赖项:uv pip install -r requirements.txt # Or, if you prefer adding specific core packages: # uv add httpx "mcp[cli]"**配置凭证:**应用程序希望将 Gausium API 凭证设置为环境变量:
GS_CLIENT_ID:您的 Gausium 应用程序客户端 ID。GS_CLIENT_SECRET:您的 Gausium 应用程序客户端密钥。GS_OPEN_ACCESS_KEY:您的 Gausium OpenAPI 访问密钥。
您可以直接在 shell 中设置这些:
export GS_CLIENT_ID="your_client_id" export GS_CLIENT_SECRET="your_client_secret" export GS_OPEN_ACCESS_KEY="your_access_key"(或者,修改
src/gs_openapi/config.py以进行开发,但不要提交凭据)。运行服务器:
python main.py默认情况下,这将使用 SSE 传输在
http://0.0.0.0:8000上启动服务器。如果需要,您可以修改main.py以使用stdio传输。
连接 MCP 客户端
一旦服务器运行,MCP 客户端(如 Cursor 或其他兼容工具)可以通过适当的传输(SSE 或 stdio)连接到它以使用定义的工具。
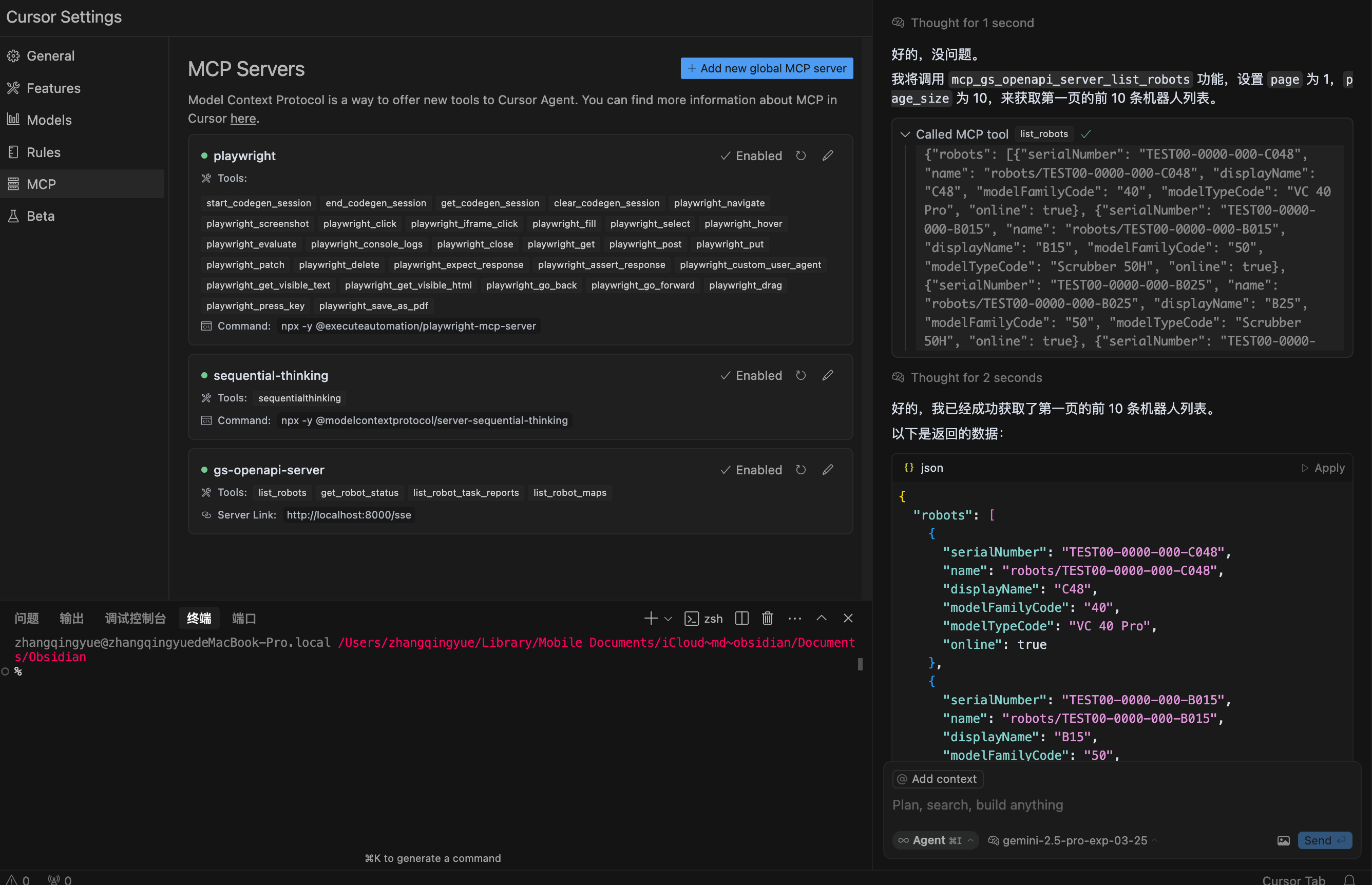
与游标一起使用
以下是 Cursor 如何与此 MCP 服务器交互的示例:
调试
您可以监控服务器日志以获取调试信息。main.py main.py的基本日志配置提供了时间戳、级别和源信息。
以下是运行过程中服务器日志输出示例:
Resources
Unclaimed servers have limited discoverability.
Looking for Admin?
If you are the server author, to access and configure the admin panel.
Latest Blog Posts
MCP directory API
We provide all the information about MCP servers via our MCP API.
curl -X GET 'https://glama.ai/api/mcp/v1/servers/cfrs2005/mcp-gs-robot'
If you have feedback or need assistance with the MCP directory API, please join our Discord server