
Hosts the source code repository for the Opentrons MCP server that can be cloned for installation from source.
Supported as a platform for running the MCP server, with specific configuration file paths provided for macOS users.
Serves as the runtime environment for the MCP server, with Node.js 18+ listed as a requirement for running the server.
Provides package management for installing the Opentrons MCP server via the recommended installation method.
Supports protocol files written in Python format (.py) that can be uploaded and executed on Opentrons robots.
Click on "Install Server".
Wait a few minutes for the server to deploy. Once ready, it will show a "Started" state.
In the chat, type
@followed by the MCP server name and your instructions, e.g., "@Opentrons MCP Servercheck if my robot at 192.168.1.100 is healthy and ready"
That's it! The server will respond to your query, and you can continue using it as needed.
Here is a step-by-step guide with screenshots.
Opentrons MCP Server
A Model Context Protocol (MCP) server for Opentrons robot automation and API documentation. This tool provides both comprehensive API documentation and direct robot control capabilities for Opentrons Flex and OT-2 robots.
Features
API Documentation Tools
Search Endpoints: Find API endpoints by functionality, method, or keyword
Endpoint Details: Get comprehensive information about specific API endpoints
Category Browsing: List endpoints by functional category
API Overview: High-level overview of the entire Opentrons HTTP API
Robot Automation Tools
Protocol Management: Upload, list, and manage protocol files
Run Control: Create runs, start/stop execution, monitor progress
Robot Health: Check connectivity and system status
Hardware Control: Home robot, control lights, and basic operations
Related MCP server: ROS2 MCP Server
Installation
From npm (recommended)
npm install -g opentrons-mcpFrom source
git clone https://github.com/yerbymatey/opentrons-mcp.git
cd opentrons-mcp
npm installConfiguration
Add to your Claude Desktop configuration file:
macOS: ~/Library/Application Support/Claude/claude_desktop_config.json
Windows: %APPDATA%\Claude\claude_desktop_config.json
{
"mcpServers": {
"opentrons": {
"command": "opentrons-mcp",
"args": []
}
}
}If installed from source:
{
"mcpServers": {
"opentrons": {
"command": "node",
"args": ["/path/to/opentrons-mcp/index.js"]
}
}
}Available Tools
Documentation Tools
search_endpoints
Search Opentrons HTTP API endpoints by functionality, method, path, or keyword.
query(required): Search termmethod(optional): Filter by HTTP method (GET, POST, PUT, DELETE, PATCH)tag(optional): Filter by API categoryinclude_deprecated(optional): Include deprecated endpoints
get_endpoint_details
Get comprehensive details about a specific API endpoint.
method(required): HTTP methodpath(required): API endpoint path
list_by_category
List all endpoints in a specific functional category.
category(required): API category (Health, Control, Protocol Management, etc.)
get_api_overview
Get high-level overview of the Opentrons HTTP API structure and capabilities.
Automation Tools
upload_protocol
Upload a protocol file to an Opentrons robot.
robot_ip(required): Robot IP addressfile_path(required): Path to protocol file (.py or .json)protocol_kind(optional): "standard" or "quick-transfer" (default: "standard")key(optional): Client tracking keyrun_time_parameters(optional): Runtime parameter values
get_protocols
List all protocols stored on the robot.
robot_ip(required): Robot IP addressprotocol_kind(optional): Filter by protocol type
create_run
Create a new protocol run on the robot.
robot_ip(required): Robot IP addressprotocol_id(required): ID of protocol to runrun_time_parameters(optional): Runtime parameter values
control_run
Control run execution (play, pause, stop, resume).
robot_ip(required): Robot IP addressrun_id(required): Run ID to controlaction(required): "play", "pause", "stop", or "resume-from-recovery"
get_runs
List all runs on the robot.
robot_ip(required): Robot IP address
get_run_status
Get detailed status of a specific run.
robot_ip(required): Robot IP addressrun_id(required): Run ID to check
robot_health
Check robot health and connectivity.
robot_ip(required): Robot IP address
control_lights
Turn robot lights on or off.
robot_ip(required): Robot IP addresson(required): true to turn lights on, false to turn off
home_robot
Home robot axes or specific pipette.
robot_ip(required): Robot IP addresstarget(optional): "robot" for all axes, "pipette" for specific mountmount(optional): "left" or "right" (required if target is "pipette")
Usage Examples
With Claude Desktop
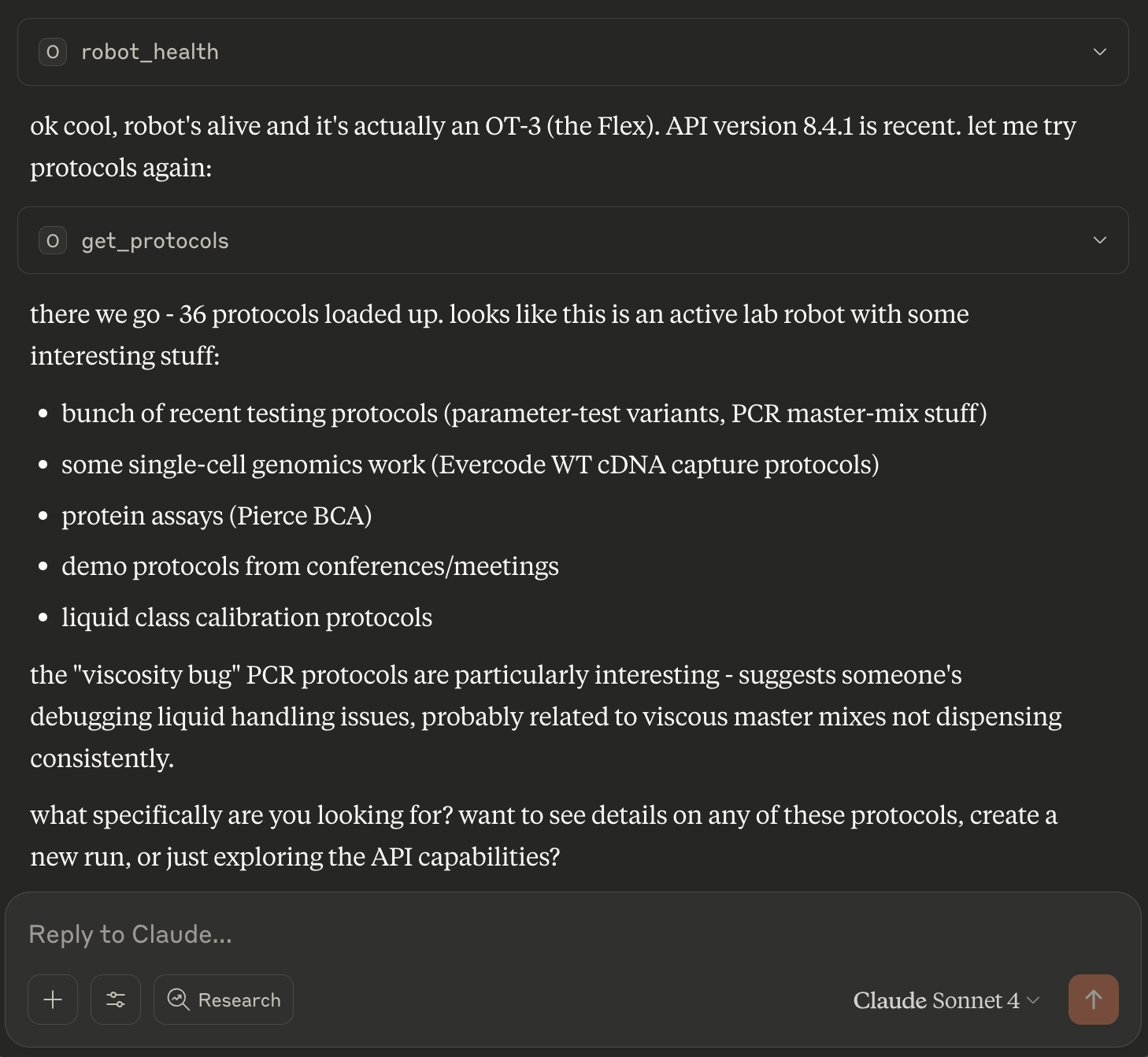 Screenshot showing the Opentrons MCP server in action with Claude Desktop after asking for current protocols with opentrons for the Flex, give it the robot ip!
Screenshot showing the Opentrons MCP server in action with Claude Desktop after asking for current protocols with opentrons for the Flex, give it the robot ip!
Once configured, you can use natural language to control your robot:
Upload a protocol:
Upload the protocol file at /path/to/my_protocol.py to my robot at 192.168.1.100Check robot status:
Check if my robot at 192.168.1.100 is healthy and readyRun a protocol:
List all protocols on my robot, then create and start a run for the latest oneMonitor progress:
Show me the status of run abc123 on my robotProgrammatic Usage
import { Client } from "@modelcontextprotocol/sdk/client/index.js";
// Connect to MCP server
const client = new Client(/* transport */);
// Upload protocol
await client.request({
method: "tools/call",
params: {
name: "upload_protocol",
arguments: {
robot_ip: "192.168.1.100",
file_path: "/path/to/protocol.py",
protocol_kind: "standard"
}
}
});Requirements
Node.js 18+
Opentrons robot with HTTP API enabled (port 31950)
Network connectivity between client and robot
Robot Setup
Ensure your Opentrons robot is:
Connected to the same network as your client
Running robot software version 7.0.0+
Accessible on port 31950 (default for HTTP API)
You can verify connectivity by visiting http://your-robot-ip:31950/health in a browser.
API Reference
This tool provides access to the complete Opentrons HTTP API, including:
Protocol Management: Upload, analyze, and manage protocol files
Run Management: Create, control, and monitor protocol runs
Hardware Control: Robot movement, homing, lighting, and calibration
System Management: Health monitoring, settings, and diagnostics
Module Control: Temperature modules, magnetic modules, thermocyclers
Data Management: CSV files for runtime parameters
For detailed API documentation, use the search and documentation tools provided by this MCP server.
Troubleshooting
Cannot connect to robot
Verify robot IP address is correct
Ensure robot is powered on and connected to network
Check that port 31950 is accessible
Confirm robot software is running
Protocol upload fails
Verify file path exists and is readable
Ensure protocol file is valid Python (.py) or JSON format
Check available disk space on robot
Confirm protocol is compatible with robot type (OT-2 vs Flex)
Run execution issues
Verify all required labware and modules are attached
Check robot calibration status
Ensure protocol analysis completed successfully
Confirm no hardware errors or conflicts
Contributing
Contributions are welcome! Please feel free to submit issues and pull requests.
License
No license go brazy